이전 내용
- cartographer localization을 일단락하고 (가속도가 너무 빠를 때는 cartographer가 정신을 못 차린다) mapping에 쓸 follow the gap node를 작성했다. 기존에 작성했던 내용에서 gap visualization과 gap parameter 추가했다.
작업 내용
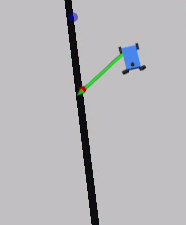
1. gap visualization에 쓸 node를 만들었다. 아쉽게도 겹치지 않는 gap index에 대해서 계속 살아있어서 어느 marker가 현재 index를 반영하는지 헷갈린다.

2. gap selection이 제대로 안되고 있다. 이상한 gap에 대해서 steering이 이뤄진다.
3. gap을 나누는 threshold와 여러 파라미터를 수정해야 되겠다.

잘했던부분
-
아쉬웠던 부분
-
참고자료
-
'작업 일지 > F1Tenth' 카테고리의 다른 글
| [작업 일지] cartographer - mapping and localization (3) | 2025.07.31 |
|---|---|
| [작업 일지] f1tenth - Xavier NX에 openCV 설치하기 (1) | 2025.06.24 |
| [작업 일지] f1tenth - rrt path 만들기 (0) | 2025.06.18 |
| [작업 일지] f1tenth - rrt sampling (3) | 2025.06.13 |
| [작업 일지] f1tenth - rrt_node (0) | 2025.06.12 |